arc3d · area · define_shape · diam · diam3d · diam_changed · distance · getSpineArea · L · n3d · pt3dadd · pt3dchange · pt3dclear · pt3dconst · pt3dinsert · pt3dremove · pt3dstyle · Ra · ri · setSpineArea · spine3d · x3d · y3d · z3d
Conceptual Overview of Sections
Sections are unbranched lengths of continuous cable connected together to form a neuron. Sections can be connected to form any tree-shaped structure but loops are not permitted. (You may, however, develop membrane mechanisms, such as electrical gap junctions which do not have the loop restriction. But be aware that the electrical current flows through such connections are calculated by a modified euler method instead of the more numerically robust fully implicit/crank-nicholson methods)
Do not confuse sections with segments. Sections are divided into segments
of equal length for numerical simulation purposes (see Section.nseg).
NEURON uses segments to represent the electrical circuit shown below.
Ra
o/`--o--'\/\/`--o--'\/\/`--o--'\/\/`--o--'\o v
| | | |
--- --- --- ---
| | | | | | | |
--- --- --- ---
| | | |
-------------------------------------------- ground
Such segments are similar to compartments in compartmental modeling programs.
Geometry
Section geometry is used to compute the area and axial resistance of each segment.
There are two ways to specify section geometry:
The stylized method simply specifies parameters for length and diameter.
The 3-D method specifies a section’s shape, orientation, and location in three dimensions.
Choose the stylized method if the notions of cable length and diameter
are authoritative and where 3-d shape is irrelevant. For plotting purposes,
length and diameter will be used to generate 3-d info automatically for
a stylized straight cylinder. (see define_shape())
Choose the 3-D method if the shape comes from 3-d reconstruction data
or if your 3-d visualization is paramount. This method makes the 3-d info
authoritative and automatically
determines the abstract cable’s length and diameter.
With this method, you may change a section’s length/diameter only by
changing it’s 3-d info. (but see pt3dconst())
Stylized specification of geometry
For simulations one needs to specify L, nseg, diam, Ra, and connectivity.
- section.L
For each section, L is the length of the entire section in microns.
- section.nseg
The section is divided into nseg compartments of length L/nseg. Membrane potential will be computed at the ends of the section and the middle of each compartment.
- seg.diam
The diameter in microns. Note that diam is a range variable and therefore must be respecified whenever
nsegis changed.- section.Ra
Axial resistivity in ohm-cm.
- connectivity
This is established with the connect command and defines the parent of the section, which end of the section is attached to the parent, and where on the parent the attachment takes place. To avoid confusion, it is best to attach the 0 end of a section to the 1 end of its parent.
In the stylized specification, the shape model used for a section is
a sequence of right circular cylinders of length, L/nseg, with diameter
given by the diam range variable at the center of each segment.
The area of a segment is PI*diam*L/nseg (micron2) and the half-segment axial
resistance is .01*sec.Ra*(L/2/sec.nseg)/(PI*(seg.diam/2)^2). The .01 factor is necessary
to convert ohm-cm micron/micron2 to MegOhms. Ends of cylinders are not
counted in the area and, in fact, the areas are very close to those of
truncated cones as long as the diameter does not change too much.
from neuron import h
import numpy
sec = h.Section(name='sec')
sec.nseg = 10
sec.Ra = 100
sec.L = 1000
# linearly interpolate diameters from 10 to 100
for seg in sec:
seg.diam = numpy.interp(seg.x, [0, 1], [10, 100])
for seg in sec.allseg():
print('{} {} {} {} {} {}'.format(seg.x, seg.diam, seg.area(),
h.PI * seg.diam * sec.L / sec.nseg, seg.ri(),
0.01 * sec.Ra * sec.L / 2 / sec.nseg / (h.PI * (seg.diam / 2) ** 2)))
Output:
0.0 14.5 0.0 4555.30934771 1e+30 0.30279180612 0.05 14.5 4555.30934771 4555.30934771 0.30279180612 0.30279180612 0.15 23.5 7382.74273594 7382.74273594 0.418069266033 0.115277459913 0.25 32.5 10210.1761242 10210.1761242 0.175549154338 0.0602716944253 0.35 41.5 13037.6095124 13037.6095124 0.0972361172657 0.0369644228403 0.45 50.5 15865.0429006 15865.0429006 0.0619274567534 0.0249630339131 0.55 59.5 18692.4762889 18692.4762889 0.0429453733627 0.0179823394497 0.65 68.5 21519.9096771 21519.9096771 0.0315498128871 0.0135674734374 0.75 77.5 24347.3430653 24347.3430653 0.0241667620512 0.0105992886138 0.85 86.5 27174.7764536 27174.7764536 0.0191076887925 0.00850840017866 0.95 95.5 30002.2098418 30002.2098418 0.0154886887932 0.00698028861454 1.0 95.5 0.0 30002.2098418 0.00698028861454 0.00698028861454
Note that the area (and length) of the 0,1 terminal ends is equal to 0
and the axial resistance
is the sum of the adjacent half-segment resistances between segment and
parent segment. Such, niceties allow the spatial discretization error to
be proportional to (1/nseg)^2. However, for second order correctness,
all point processes must be located at the center of the segments or at the
ends and all branches should be connected at the ends or centers of segments.
Note that if one increases nseg by a factor of 3, old centers are preserved.
For single compartment simulations it is most convenient to choose a membrane area of 100 micron2 so that point process currents (nanoamps) are equivalent to density currents (milliamps/cm2).
Also note that a single compartment of length = diameter has the same effective area as that of a sphere of the same diameter.
- Example:
The following example demonstrates the automatic 3-d shape construction. The root section “a” is drawn with it’s 0 end (left) at the origin and is colored red.
Sections connected to its 1 end (sections b, c, d) get drawn from left to right. Sections descended from the 0 end (section e) of the root get drawn from right to left.
Especially note the diameter pattern of section c whose “1” end is connected to the “b” parent. You don’t have to understand this if you always connect the “0” end to the parent.
from neuron import h, gui import numpy a, b, c, d, e = [h.Section(name=n) for n in ['a', 'b', 'c', 'd', 'e']] b.connect(a) c.connect(b(1), 1) # connect the 1 end of c to the 1 end of b d.connect(b) e.connect(a(0)) # connect the 0 end of e to the 0 end of a for sec in h.allsec(): sec.nseg = 20 sec.L = 100 for seg in sec: seg.diam = numpy.interp(seg.x, [0, 1], [10, 40]) s = h.Shape() s.show(False) s.color(2, sec=a) # color section "a" red h.topology() h.finitialize(-65) for sec in h.allsec(): print(sec) for i in range(sec.n3d()): print('%d: (%g, %g, %g; %g)' % (i, sec.x3d(i), sec.y3d(i), sec.z3d(i), sec.diam3d(i)))

If you change the diameter or length, the Shape instances are automatically redrawn or when
doNotify()is called. Segment area and axial resistance will be automatically recomputed prior to their use.Under some circumstances, involving nonlinearly varying diameters across a section, at first sight surprising results can occur when the stylized method is used and a Shape instance is created. This is because under a define_shape() with no pre-existing 3-d points in a section, a number of 3-d points is created equal to the number of segments plus the end areas. When 3-d points exist, they determine the calculation of L, diam, area, and ri. Thus diam can change slightly merely due to shape creation. When L and diam are changed, there is first a change to the 3-d points and then L and diam are updated to reflect the actual values of these 3-d points. Due to multiple interpolation effects, specifying a nonlinearly varying diam will, in general, not give exactly the same diameter values as the case where no 3-d information exists. This effect is illustrated in the following example
from neuron import h, gui def pr(nseg): sec.pt3dclear() sec.nseg = nseg setup_diam() h.define_shape() print_stats() def setup_diam(): for seg in sec: seg.diam = 20 if 0.34 <= seg.x <= 0.66 else 10 def print_stats(): for seg in sec.allseg(): print('%g %g %g %g' % (seg.x * sec.L, seg.diam, seg.area(), seg.ri())) h.xpanel("change nseg") h.xradiobutton("nseg = 3", (pr, 3)) h.xradiobutton("nseg = 11", (pr, 11)) h.xradiobutton("nseg = 101", (pr, 101)) h.xpanel() sec = h.Section(name='sec') sec.Ra = 100 sec.L = 100 sec.nseg = 3 setup_diam() print_stats() s = h.Shape() s.show(False) for i in range(sec.n3d()): print('%d: %g %g') % (i, sec.arc3d(i), sec.diam3d(i))) print("L= %g" % sec.L) print_stats()
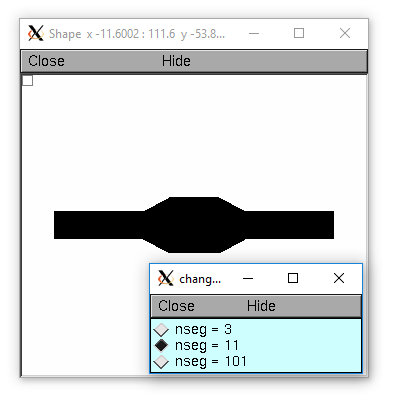
The difference is that the 3-d points define a series of truncated cones instead of a series of right circular cylinders. The difference is reduced with larger nseg. With the stylized method, abrupt changes in diameter should only take place at the boundaries of sections if you wish to view shape and also make use of the fewest possible number of segments. But remember, end area of the abrupt changes is not calculated. For that, you need an explicit pair of 3-d points with the same location and different diameters.
3-D specification of geometry
3-d information for a section is kept in a list of (x,y,z,diam) “points”. The first point is associated with the end of the section that is connected to the parent (NB: Not necessarily the 0 end) and the last point is associated with the opposite end. There must be at least two points and they should be ordered in terms of monotonically increasing arc length.
The root section is treated as the origin of the cell with respect to 3-d position. When any section’s 3-d shape or length changes, all the sections in the child trees have their 3-d information translated to correspond to the new position. So, assuming the soma is the root section, to translate an entire cell to another location it suffices to change only the location of the soma. It will avoid confusion if, except for good reason, one attaches only the 0 end of a child section to a parent. This will ensure that the sec(x).diam as x ranges from 0 to 1 has the same sense as sec.diam3d(i) as i ranges from 0 to sec.n3d()-1.
The shape model used for a section when the pt3d list is non-empty
is that of a sequence of truncated cones in which the pt3d points define
the location and diameter of the ends. From this sequence of points,
the effective area, diameter, and resistance is computed for each segment
via a trapezoidal integration across the segment length. This takes
into account the extra area due to sqrt(dx^2 + dy^2) for fast changing
diameters (even degenerate cones of 0 length can be specified, ie. two
points with same coordinates but different diameters)
but no attempt is made to deal with centroid curvature effects
on the area. Note that the number of 3d points used to describe a shape
has nothing to do with nseg and does not affect simulation speed.
(Although, of course, it does affect how fast one can draw the shape)
- Example:
The following illustrates the notion of the 3-d points as describing a sequence of cones. Note that the segment area and resistance is different than the simplistic calculation used in the stylized method. In this case the area of the segment has very little to do with the diameter of the center of the segment.
from neuron import h, gui from math import sin, cos sec = h.Section(name='sec') sec.Ra=100 sec.nseg = 10 h.pt3dclear(sec=sec) for i in range(31): x = h.PI * i / 30. h.pt3dadd(200 * sin(x), 200 * cos(x), 0, 100 * sin(4 * x), sec=sec) s = h.Shape() s.show(0) print(sec.L) for seg in sec.allseg(): print('{} {} {} {} {} {}'.format( seg.x, seg.diam, seg.area(), h.PI * seg.diam * sec.L / sec.nseg, seg.ri(), 0.01 * sec.Ra * sec.L / 2 / sec.nseg / (h.PI * (seg.diam / 2) ** 2)))
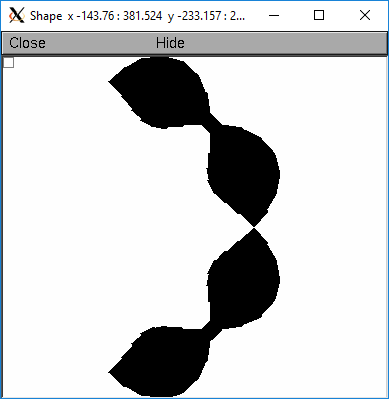
Note that at one point the diameter is numerically 0 and the axial resistance becomes essentially infinite thus decoupling the adjacent segments. Take care to avoid constructing spheres with a beginning and ending diameter of 0. No current would flow from the end to a connecting section. The end diameter should be the diameter of the end of the connecting section.
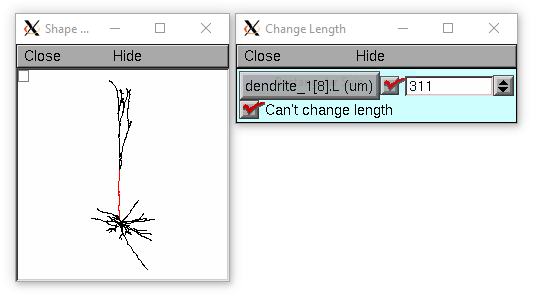
The following loads the pyramidal cell 3-d reconstruction from the demo directory of your neuron system. Notice that you can modify the length only if the pt3dconst mode is 0.
from neuron import h, gui import __main__ h.xopen("$(NEURONHOME)/demo/pyramid.nrn") mode = 1 h.pt3dconst(mode) # uses default section from pyramid.nrn s = h.Shape() s.action(lambda: s.select(sec=h.dendrite_1[8])) s.color(2, sec=h.dendrite_1[8]) h.xpanel("Change Length") h.xvalue("dendrite_1[8].L", "dendrite_1[8].L", 1) # using HOC syntax # to directly access # the length h.xcheckbox("Can't change length", (__main__, 'mode'), lambda: h.pt3dconst(mode, sec=h.dendrite_1[8])) h.xpanel()
See also
pt3dclear(), pt3dadd(), pt3dconst(), pt3dstyle(), n3d(), x3d(), y3d(), z3d(), diam3d(), arc3d()
getSpineArea(), setSpineArea(), spine3d()
See also
If 3-D shape is not an issue it is sufficient to specify the section variables L (length in microns), Ra (axial resistivity in ohm-cm), and the range variable diam (diameter in microns).
A list of 3-D points with corresponding diameters describes the geometry of a given section.
Defining the 3D Shape
- pt3dclear()
- Syntax:
buffersize = h.pt3dclear(sec=section)buffersize = h.pt3dclear(buffersize, sec=section)- Description:
Destroy the 3d location info in
section. With an argument, that amount of space is allocated for storage of 3-d points in that section.
Note
A more object-oriented approach is to use
sec.pt3dclear()instead.
- pt3dadd()
- Syntax:
h.pt3dadd(x, y, z, d, sec=section)h.pt3dadd(xvec, yvec, zvec, dvec, sec=section)
Description:
Add the 3d location and diameter point (or points in the second form) at the end of the current pt3d list. Assume that successive additions increase the arc length monotonically. When pt3d points exist in
sectionthey are used to compute diam and L. When diam or L are changed andh.pt3dconst(sec=section)==0the 3-d info is changed to be consistent with the new values of L and diam. (Note: When L is changed,h.define_shape()should be executed to adjust the 3-d info so that branches appear connected.) The existence of a spine at this point is signaled by a negative value for d.The vectorized form is more efficient than looping over lists in Python.
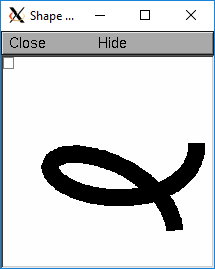
Example of vectorized specification:
from neuron import h, gui import numpy # compute vectors defining a geometry theta = numpy.linspace(0, 6.28, 63) xvec = h.Vector(4 * numpy.cos(theta)) yvec = h.Vector(4 * numpy.sin(theta)) zvec = h.Vector(theta) dvec = h.Vector([1] * len(theta)) dend = h.Section(name='dend') h.pt3dadd(xvec, yvec, zvec, dvec, sec=dend) s = h.Shape() s.show(0)
Note
The vectorized form was added in NEURON 7.5.
Note
A more object-oriented approach is to use
sec.pt3daddinstead.
- pt3dconst()
- Syntax:
h.pt3dconst(0, sec=section)h.pt3dconst(1, sec=section)- Description:
If
pt3dconstis set at 0, newly assigned values for d and L will automatically update pre-existing 3d information.pt3dconstreturns its previous state on each call. Its original value is 0.Note that the diam information transferred to the 3d point information comes from the current diameter of the segments and does not change the number of 3d points. Thus if there are a lot of 3d points the shape will appear as a string of uniform diameter cylinders each of length L/nseg. ie. after transfer
sec.diam3d(i) == sec(sec.arc3d(i)/sec.L).diam. Then, after a call to an internal function such asarea()orh.finitialize(-65), the 3d point info will be used to determine the values of the segment diameters.Because of the three separate interpolations: hoc range spec -> segment diameter -> 3d point diam -> segment diameter, the final values of the segment diameter may be different from the case where 3d info does not exist.
Because of the surprises noted above, when using 3d points consider treating them as the authoritative diameter info and set
h.pt3dconst(1, sec=section).3d points are automatically generated when one uses the NEURON Shape class. Experiment with
sec.nsegandsec.n3d()in order to understand the exact consequences of interpolation.
See also
- pt3dstyle()
- Syntax:
style = h.pt3dstyle(sec=section)style = h.pt3dstyle(0, sec=section)style = h.pt3dstyle(1, x, y, z, sec=section)style = h.pt3dstyle(1, _ref_x, _ref_y, _ref_z, sec=section)- Description:
With no args besides the
sec=keyword, returns 1 if using a logical connection point.With a first arg of 0, then style is NO logical connection point and (with
pt3dconst()== 0 andh.define_shape()is executed) the 3-d location info is translated so the first 3-d point coincides with the parent connection location. This is the classical and default behavior.With a first arg of 1 and x,y,z value arguments, those values are used to define a logical connection point relative to the first 3-d point. When
pt3dconst()== 0 and define_shape is executed, the 3-d location info is translated so that the logical connection point coincides with the parent connection location. Note that logical connection points have absolutely no effect on the electrical properties of the structure since they do not affect the length or area of a section. They are useful mostly for accurate visualization of a dendrite connected to the large diameter edge of a soma that happens to be far from the soma centroid. The logical connection point should be set to the location of the parent centroid connection, i.e. most often the 0.5 location of the soma. Note, that under translation and scaling, the relative position between the logical connection point and the first 3-d point is preserved.With a first arg of 1 and x,y,z reference arguments, the x,y,z variables are assigned the values of the logical connection point (if the style in fact was 1).
See also
- pt3dinsert()
- Syntax:
h.pt3dinsert(i, x, y, z, diam, sec=section)- Description:
Insert the point (so it becomes the i’th point) to
section. If i is equal tosection.n3d(), the point is appended (equivalent topt3dadd()).
- pt3dremove()
- Syntax:
h.pt3dremove(i, sec=section)- Description:
Remove the i’th 3D point from
section.
- pt3dchange()
- Syntax:
h.pt3dchange(i, x, y, z, diam, sec=section)h.pt3dchange(i, diam, sec=section)- Description:
Change the i’th 3-d point info. If only two args then the second arg is the diameter and the location is unchanged.
h.pt3dchange(5, section.x3d(5), section.y3d(5), section.z3d(5), section.diam3d(5) if not h.spine3d(sec=section) else -section.diam3d(5), sec=section)
leaves the pt3d info unchanged.
Reading 3D Data from NEURON
- n3d()
- Syntax:
section.n3d()h.n3d(sec=section)- Description:
Return the number of 3d locations stored in the
section. Thesection.n3d()syntax returns an integer and is generally clearer than theh.n3d(sec=section)which returns a float and therefore has to be cast to an int to use withrange. The latter form is, however, slightly more efficient when used withsection.push()andh.pop_section()to set a default section used for many morphology queries (in which case the sec= would be omitted).
- x3d()
- Syntax:
section.x3d(i)h.x3d(i, sec=section)- Description:
Returns the x coordinate of the ith point in the 3-d list of the
section(or in the second form, if no section is specified of NEURON’s current default section). As withn3d(), temporarily setting the default section is slightly more efficient when dealing with large numbers of queries about the same section; the tradeoff is a loss of code clarity.
- diam3d()
- Syntax:
section.diam3d(i)h.x3d(diam, sec=section)- Description:
Returns the diameter of the ith 3d point of
section(or of NEURON’s current default if nosec=argument is provided).diam3d(i)will always be positive even if there is a spine at the ith point.
See also
- arc3d()
- Syntax:
section.arc3d(i)h.arc3d(i, sec=section)- Description:
This is the arc length position of the ith point in the 3d list.
section.arc3d(section.n3d()-1) == section.L
- spine3d()
- Syntax:
h.spine3d(i, sec=section)- Description:
Return 0 or 1 depending on whether a spine exists at this point.
- setSpineArea()
- Syntax:
h.setSpineArea(area)- Description:
The area of an average spine in um2.
setSpineAreamerely adds to the total area of a segment.
Note
This value affects all sections on the current compute node.
- getSpineArea()
- Syntax:
h.getSpineArea()- Description:
Return the area of the average spine. This value is the same for all sections.
- define_shape()
- Syntax:
h.define_shape()- Description:
Fill in empty pt3d information with a naive algorithm based on current values for L and diam. Sections that already have pt3d info are translated to ensure that their first point is at the same location as the parent. But see
pt3dstyle()with regard to the use of a logical connection point if the translation ruins the visualization.Note: This may not work right when a branch is connected to the interior of a parent section
0 < x < 1, rather only when it is connected to the parent at 0 or 1.
- area()
- Syntax:
h.area(x, sec=section)section(x).area()- Description:
Return the area (in square microns) of the segment
section(x).section(0).area()andsection(1).area()= 0
- ri()
- Syntax:
h.ri(x, sec=section)section(x).ri()- Description:
Return the resistance (in megohms) between the center of the segment
section(x)and its parent segment. This can be used to compute axial current given the voltage at two adjacent points. If there is no parent the “infinite” resistance returned is 1e30.
Example:
for seg in sec.allseg(): print('%g %g %g' % (seg.x * sec.L, seg.area(), seg.ri()))
will print the arc length, the segment area at that arc length, and the resistance along that length for the section
sec.
- distance()
- Syntax:
h.distance(sec=section)orh.distance(0, x, sec=section)orh.distance(0, section(x))length = h.distance(x, sec=section)orlength = h.distance(1, x, sec=section)length = h.distance(segment1, segment2)
Description:
Compute the path distance between two points on a neuron. If a continuous path does not exist the return value is 1e20.
h.distance(sec=section)specifies the origin as location 0 of
sectionh.distance(x, sec=section)orh.distance(section(x))for 0 <= x <= 1returns the distance (in microns) from the origin to
section(x).
To overcome the old initialization restriction,
h.distance(0, x, sec=section)or the shorterh.distance(0, section(x))can be used to set the origin. Note that distance is measured from the centers of segments.Example:
from neuron import h soma = h.Section(name='soma') dend = h.Section(name='dend') dend.connect(soma(0.5)) soma.L = 10 dend.L = 50 length = h.distance(soma(0.5), dend(1))
Warning
When subtrees are connected by
ParallelContext.multisplit(), the distance function returns 1e20 if the path spans the split location.Note
Support for the variants of this function using a segment (i.e. with
section(x)) was added in NEURON 7.5. The two segment form requires NEURON 7.7+.See also
- diam_changed
- Syntax:
h.diam_changed = 1- Description:
Signals the system that the coefficient matrix needs to be recalculated.
This is not needed since
Rais now a section variable and automatically sets diam_changed whenever any sections Ra is changed. Changing diam or any pt3d value will cause it to be set automatically.
Note
The value is automatically reset to 0 when NEURON has recalculated the coefficient matrix, so reading it may not always produce the result you expect.
If it is important to monitor changes to the diameter, look at the internal variable
diam_change_cntwhich increments every timeh.diam_changedis automatically reset to 0:from neuron import h, gui import neuron import ctypes import time diam_change_cnt = neuron.nrn_dll_sym('diam_change_cnt', ctypes.c_int) print('{} {}'.format(h.diam_changed, diam_change_cnt.value) # 1 0 s = h.Section(name='s') print('{} {}'.format(h.diam_changed, diam_change_cnt.value) # 1 0 time.sleep(0.2) print('{} {}'.format(h.diam_changed, diam_change_cnt.value) # 0 1 s.diam = 42 print('{} {}'.format(h.diam_changed, diam_change_cnt.value) # 1 1 time.sleep(0.2) print('{} {}'.format(h.diam_changed, diam_change_cnt.value) # 1 2
- L
section.LLength of a section in microns.
- diam
section(x).diamDiameter range variable of a section in microns.
- Ra
- Syntax:
section.Ra- Description:
Axial resistivity in ohm-cm. This used to be a global variable so that it was the same for all sections. Now, it is a section variable and must be set individually for each section. A simple way to set its value is
for sec in h.allsec(): sec.Ra = 35.4Prior to 1/6/95 the default value for Ra was 34.5. Presently it is 35.4.